

3大ヒューマノイドロボットのバランス能力
このブログでは、Unitree H1、Atlas、Tesla Optimus という 3 つの代表的なヒューマノイド ロボットを取り上げ、ロボットのバランス能力の重要なパフォーマンスに焦点を当てます。
Ⅰ.ユニツリーH1

強力な関節トルク
Unitree H1 の脚部の関節モーターは、優れたピークトルクを特徴としています。膝関節モーターの最大トルクは 360N.m に達し、股関節は約 220N.m、足首関節は約 45N.m です。高トルク関節モーターは、ロボットに強力なパワーサポートを提供し、体の姿勢をより適切に制御し、外部からの妨害に抵抗し、歩行や移動中のバランスを維持できるようにします。たとえば、蹴られたりぶつかったりするなどの突然の外部衝撃に直面した場合、強力な関節トルクにより、ロボットは素早く姿勢を調整してバランスを維持できます。
高度なバランス調整アルゴリズム
H1 の歩行とバランスは、人間の介入なしに自律計算によって実現されます。動作制御アルゴリズムと歩行プログラミングは慎重に設計され、最適化されています。激しい衝撃を受けた後でも、素早く姿勢を調整して体のバランスを保つことができます。また、障害物を感知して能動的に回避することもできます。
精密認識システム
H1は3D LiDARと深度カメラを搭載しており、360度のパノラマ深度知覚が可能です。ローカルの通行可能マップを素早く取得し、障害物を効果的に回避または乗り越えることができます。知覚システムを通じて、ロボットは周囲の環境に関するリアルタイム情報を取得し、バランスに影響を与える可能性のある要因を事前に予測し、タイムリーに調整することができます。たとえば、歩行中に不均一な地面や障害物に遭遇した場合、知覚情報に応じて足の位置と体の重心を素早く調整し、バランスのとれた安定性を維持できます。
軽量かつ安定した構造設計
H1は軽量素材で設計されており、総重量はわずか47キログラム、高さは約1.8メートルです。歩行姿勢は軽くて安定しています。軽量化により、ロボットは移動中に柔軟性が高まり、慣性が少なくなり、さまざまな状況に適応するために姿勢をすばやく調整して、バランスをよりよく維持できます。同時に、合計19の自由度があり、脚には10の自由度があり、非常に柔軟なペース調整が可能です。腰には1自由度が装備されており、スムーズで自然な動きを確保し、腕には8自由度があり、複雑な操作タスクを実行できます。この多自由度の構造設計は、ロボットのバランス能力の向上にも貢献しています。
Ⅱ.ボストンアトラス
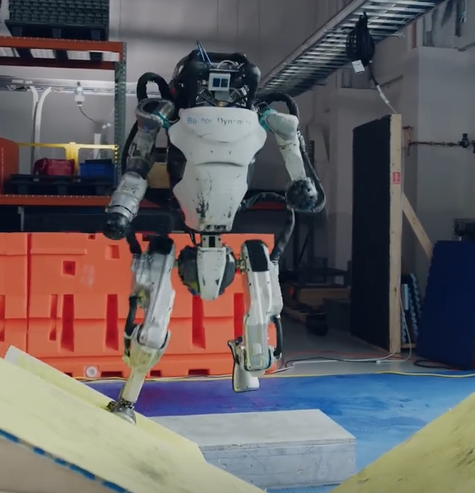
高度な制御アルゴリズム
Atlas は、フロリダの人間と機械の認知研究所 (IHMC) が開発した制御アルゴリズムを採用しています。厚さ 1 インチ未満の合板の端で約 22 秒間バランスを保つことができます。モデル予測制御 (MPC) などのアルゴリズムにより、各関節のトルクと速度をリアルタイムで調整できます。バックフリップなどの複雑な動作を実行する場合でも、宙返りの過程で重心の安定性を確保できます。
精密認識システム
LiDAR、RGB-Dカメラ、慣性計測ユニット(IMU)、関節力センサーなど、さまざまなセンサーが搭載されています。LiDARとRGB-Dカメラは3D環境モデルを構築し、障害物や地面の凹凸を事前に検出できます。これにより、ロボットはバランスを維持するために事前に歩幅と姿勢を調整できます。IMUは姿勢と速度をリアルタイムで監視し、関節力センサーは脚と地面の間の力を検知し、バランス制御に重要なデータを提供します。
柔軟性の高いジョイント設計
アトラスは28の自由度を持ち、脚と腕にそれぞれ6自由度、背中の関節に3自由度、首のピッチングに1自由度があります。この多自由度の関節設計により、アトラスは人間と同じくらい柔軟に体の姿勢を調整できます。歩く、ジャンプする、運ぶなどのさまざまな動作中に、重心の位置を素早く調整して体のバランスを保つことができます。
強力な動力システムは、高性能の電動アクチュエータまたは油圧駆動システムを使用しており、ロボットに強力で正確な動力出力を提供できます。雪の中を歩く、木製の障害物を越える、高さの異なる箱の上で三段跳びするなど、外部からの妨害や複雑な地形に直面しても、ロボットは迅速に反応し、姿勢を調整し、バランスを維持できます。
Ⅲ.テスラオプティマス

高度なニューラルネットワークと制御アルゴリズム
- 効率的な処理と正確な制御:組み込みコンピューター上で実行されるニューラル ネットワークは、搭載センサーからのデータを処理し、2 ~ 3 ミリ秒以内に応答して、電動手足を正確に制御できます。これにより、ロボットは歩行中や走行中に姿勢と歩幅を適時に調整してバランスを保つことができます。
- 複雑な地形への自律適応:視覚システムの支援なしに、Optimus は木の根や岩で覆われた 45 度の斜面を歩いたり走ったりすることができます。複雑な地形に対処するために、高度なニューラル ネットワークと内蔵のバランス メカニズムのみに依存し、体の姿勢と歩幅を自律的に調整します。
マルチセンサーフュージョン
- 慣性計測装置(IMU)とトルクセンサー:視覚が限られている、または利用できない環境でも、IMUやトルクセンサーなどのセンサーにより、ロボットは自身の姿勢、速度、および力の負荷状態を正確に認識できます。これらは、体の傾きや加速度などの情報をリアルタイムで監視し、バランス制御に重要なデータを提供し、ロボットがバランスを維持するために素早く反応できるようにします。
- 足の力/トルク感知機能の追加:第2世代ロボットには足の力/トルク感知機能が追加され、足と地面の間の接触力とトルクの感知がさらに強化されました。これにより、ロボットは歩行中や操作中に足の力と姿勢をより正確に調整し、バランスをより適切に維持できます。
非常に柔軟なボディ構造
- 多自由度設計:オプティマスは200以上の自由度を持ち、バイオニックフィンガーは27の自由度で非常に柔軟で、自然な曲げが可能です。歩行時には、脚や腰などの関節の複数の自由度を調整することで、ロボットは人間と同じように柔軟に体の姿勢や重心位置を調整し、地形の変化に素早く適応してバランスを保つことができます。
- 軽量化とバランス性能の向上:第2世代ロボットの重量は73kgから63kgに軽量化されました。軽量化により、ロボットはより柔軟に動き、慣性が少なくなり、バランス能力が向上しました。同時に、バランス感覚と身体制御が向上し、スクワットなどの動作を実行できるようになりました。







