

القدرة على تحقيق التوازن بين ثلاثة روبوتات بشرية رئيسية
تسلط هذه المدونة الضوء على الأداء الحاسم لقدرة الروبوت على التوازن، مع الأخذ في الاعتبار ثلاثة روبوتات بشرية نموذجية، Unitree H1، وAtlas، وTesla Optimus.
1.يونيتري H1

عزم دوران قوي للمفصل
تتميز محركات المفاصل في أرجل Unitree H1 بعزم دوران ذروة ملحوظ. يمكن أن يصل أقصى عزم دوران لمحرك مفصل الركبة إلى 360 نيوتن متر، ومفصل الورك حوالي 220 نيوتن متر، ومفصل الكاحل حوالي 45 نيوتن متر. توفر محركات المفاصل عالية عزم الدوران دعمًا قويًا للطاقة للروبوت، مما يمكنه من التحكم بشكل أفضل في وضعية جسمه، ومقاومة الاضطرابات الخارجية، والحفاظ على التوازن أثناء المشي والحركة. على سبيل المثال، عند مواجهة التأثيرات الخارجية المفاجئة مثل الركل أو الاصطدام، يسمح عزم الدوران القوي للمفصل للروبوت بتعديل وضعيته بسرعة للحفاظ على التوازن.
خوارزمية الموازنة المتقدمة
تتم عملية المشي والتوازن في H1 من خلال حسابات مستقلة دون تدخل بشري. تم تصميم وتحسين خوارزميات التحكم في الحركة وبرمجة المشي بعناية. حتى بعد التعرض لصدمات عنيفة، يمكنه تعديل وضعيته بسرعة والحفاظ على توازن الجسم. كما يمكنه تجنب العوائق بنشاط بعد استشعارها.
نظام الإدراك الدقيق
تم تجهيز H1 بجهاز LiDAR ثلاثي الأبعاد وكاميرا عمق، مما يتيح إدراك عمق بانورامي بزاوية 360 درجة. ويمكنه الحصول بسرعة على خريطة محلية يمكن المرور عليها، وتجنب العقبات أو تخطيها بفعالية. ومن خلال نظام الإدراك، يمكن للروبوت الحصول على معلومات في الوقت الفعلي حول البيئة المحيطة، وتوقع العوامل التي قد تؤثر على التوازن مسبقًا، وإجراء التعديلات في الوقت المناسب. على سبيل المثال، أثناء المشي، عند مواجهة أرض غير مستوية أو عقبات، يمكنه بسرعة ضبط موضع قدميه ومركز ثقل جسمه وفقًا للمعلومات المدركة للحفاظ على الاستقرار المتوازن.
تصميم هيكلي خفيف الوزن ومستقر
تم تصميم H1 بمواد خفيفة الوزن. يبلغ الوزن الإجمالي 47 كيلوغرامًا فقط، ويبلغ ارتفاعه حوالي 1.8 متر. وضعية المشي الخاصة به خفيفة ومستقرة. يجعل الوزن الأخف الروبوت أكثر مرونة أثناء الحركة، مع خمول أقل، مما يسهل التعديل السريع للوضعية للتكيف مع المواقف المختلفة وبالتالي الحفاظ على التوازن بشكل أفضل. وفي الوقت نفسه، يتمتع بـ 19 درجة من الحرية في المجموع، 10 في الساقين، مما يتيح تعديل وتيرة مرنة للغاية. تم تجهيز الخصر بدرجة واحدة من الحرية لضمان حركات سلسة وطبيعية، والذراعان لها 8 درجات من الحرية، مما يسمح لها بأداء مهام تشغيلية معقدة. يساهم هذا التصميم الهيكلي متعدد درجات الحرية أيضًا في تعزيز قدرة الروبوت على التوازن.
2. أطلس بوسطن
خوارزميات التحكم المتقدمة
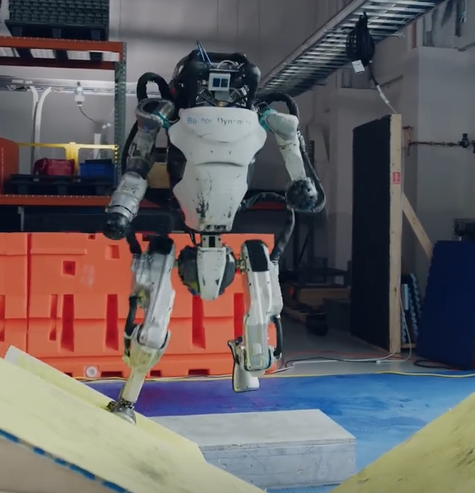
يعتمد أطلس على خوارزميات التحكم التي طورها معهد الإدراك البشري والآلي (IHMC) في فلوريدا. ويمكنه الحفاظ على التوازن على حافة الخشب الرقائقي الذي يقل سمكه عن بوصة واحدة لمدة 22 ثانية تقريبًا. ومن خلال خوارزميات مثل التحكم التنبئي بالنماذج (MPC)، يمكنه ضبط عزم الدوران وسرعة كل مفصل في الوقت الفعلي. وحتى عند القيام بحركات معقدة مثل القفزات الخلفية، يمكنه ضمان استقرار مركز الثقل أثناء عملية القفز.
نظام الإدراك الدقيق
تم تجهيز الروبوت بمجموعة متنوعة من أجهزة الاستشعار بما في ذلك LiDAR وكاميرات RGB - D ووحدات القياس بالقصور الذاتي (IMUs) وأجهزة استشعار القوة المشتركة. يمكن لكاميرات LiDAR وRGB - D إنشاء نموذج بيئي ثلاثي الأبعاد، واكتشاف العوائق وعدم استواء الأرض مسبقًا. يتيح هذا للروبوت ضبط خطواته ووضعيته مسبقًا للحفاظ على التوازن. تراقب وحدات IMUs الوضع والسرعة في الوقت الفعلي، وتكتشف أجهزة استشعار القوة المشتركة القوى بين الساقين والأرض، مما يوفر بيانات حاسمة للتحكم في التوازن.
تصميم مفصل مرن للغاية
يتمتع أطلس بـ 28 درجة من الحرية، مع 6 درجات من الحرية في كل ساق وذراع، و3 درجات من الحرية في مفاصل الظهر، ودرجة واحدة من الحرية لانحناء الرقبة. يسمح تصميم المفصل متعدد درجات الحرية لأطلس بتعديل وضعية جسمه بمرونة مثل الإنسان. أثناء القيام بالعديد من الحركات مثل المشي والقفز والحمل، يمكنه تعديل موضع مركز الجاذبية بسرعة للحفاظ على توازن الجسم.
يستخدم نظام الطاقة القوي محركات كهربائية عالية الأداء أو أنظمة دفع هيدروليكية، والتي يمكنها توفير خرج طاقة قوي ودقيق للروبوت. عند مواجهة الاضطرابات الخارجية أو التضاريس المعقدة، مثل المشي في الثلج، أو عبور العوائق الخشبية، أو القفز الثلاثي على صناديق ذات ارتفاعات مختلفة، يمكنه الاستجابة بسرعة وتعديل وضعيته والحفاظ على التوازن.
3.تسلا أوبتيموس

الشبكات العصبية المتقدمة وخوارزميات التحكم
- معالجة فعّالة وتحكم دقيق: يمكن للشبكة العصبية التي تعمل على الكمبيوتر المدمج معالجة البيانات من أجهزة الاستشعار الموجودة على متن الروبوت والاستجابة في غضون 2 إلى 3 مللي ثانية، مما يتيح التحكم الدقيق في الأطراف الكهربائية. وهذا يسمح للروبوت بتعديل وضعيته وخطواته في الوقت المناسب أثناء المشي أو الجري للحفاظ على التوازن.
- التكيف المستقل مع التضاريس المعقدة: بدون مساعدة نظام الرؤية، يمكن لـ Optimus المشي أو حتى الجري على منحدر بزاوية 45 درجة مغطى بالجذور والصخور. يعتمد بالكامل على الشبكات العصبية المتقدمة وآليات التوازن المدمجة للتعامل مع التضاريس المعقدة، وتعديل وضعية جسمه وخطواته بشكل مستقل.
دمج أجهزة استشعار متعددة
- وحدة قياس القصور الذاتي (IMU) ومستشعرات عزم الدوران : حتى في البيئات التي تكون فيها الرؤية محدودة أو غير متاحة، فإن المستشعرات مثل وحدات قياس القصور الذاتي ومستشعرات عزم الدوران تمكن الروبوت من إدراك وضعيته وسرعته وظروف تحمل القوة بدقة. إنها تراقب المعلومات مثل إمالة الجسم والتسارع في الوقت الفعلي، مما يوفر بيانات حاسمة للتحكم في التوازن، مما يتيح للروبوت الاستجابة بسرعة للحفاظ على التوازن.
- تمت إضافة استشعار قوة القدم/عزم الدوران: تمت إضافة استشعار قوة القدم/عزم الدوران للروبوت من الجيل الثاني، مما يعزز بشكل أكبر إدراك قوة التلامس وعزم الدوران بين القدمين والأرض. وهذا يسمح للروبوت بضبط قوة ووضعية قدميه بدقة أكبر أثناء المشي والعمل، وبالتالي الحفاظ على التوازن بشكل أفضل.
بنية الجسم شديدة المرونة
- تصميم متعدد درجات الحرية : يتمتع أوبتيموس بأكثر من 200 درجة من الحرية، وأصابعه الصناعية مرنة للغاية مع 27 درجة من الحرية، وقادرة على الانحناء الطبيعي. أثناء المشي، يتيح تنسيق درجات الحرية المتعددة في المفاصل مثل تلك الموجودة في الساقين والخصر للروبوت تعديل وضعية جسمه وموضع مركز الجاذبية بمرونة مثل الإنسان، والتكيف بسرعة مع تغيرات التضاريس والحفاظ على التوازن.
- تحسين الوزن الخفيف والتوازن : تم تقليل وزن الروبوت من الجيل الثاني من 73 كجم إلى 63 كجم. يجعل الوزن الأخف الروبوت أكثر مرونة أثناء الحركة مع قلة القصور الذاتي، مما يساعد على تحسين قدرته على التوازن. وفي الوقت نفسه، تم تحسين إحساسه بالتوازن والتحكم في الجسم، مما يسمح له بأداء حركات مثل القرفصاء.







