

Balancing Ability of Three Major Humanoid Robots
This blog focuses on the crucial performance of robot balance ability, taking three typical humanoid robots, Unitree H1, Atlas, and Tesla Optimus.
Ⅰ.Unitree H1

Strong Joint Torque
The joint motors in the legs of Unitree H1 feature remarkable peak torque. The maximum torque of the knee joint motor can reach 360N.m, the hip joint is approximately 220N.m, and the ankle joint is around 45N.m. The high - torque joint motors provide strong power support for the robot, enabling it to better control its body posture, resist external disturbances, and maintain balance during walking and movement. For example, when facing sudden external impacts like being kicked or bumped, the powerful joint torque allows the robot to quickly adjust its posture to maintain balance.
Advanced Balancing Algorithm
The walking and balancing of H1 are accomplished through autonomous calculations without human intervention. Its motion control algorithms and gait programming are carefully designed and optimized. Even after suffering violent impacts, it can rapidly adjust its posture and maintain body balance. It can also actively avoid obstacles after sensing them.
Precise Perception System
H1 is equipped with a 3D LiDAR and a depth camera, enabling 360 - degree panoramic depth perception. It can quickly obtain a local passable map, effectively avoiding or stepping over obstacles. Through the perception system, the robot can acquire real - time information about the surrounding environment, anticipate factors that may affect balance in advance, and make timely adjustments. For instance, during walking, when encountering uneven ground or obstacles, it can quickly adjust the position of its feet and the center of gravity of its body according to the perceived information to maintain balanced stability.
Lightweight and Stable Structural Design
H1 is designed with lightweight materials. The overall weight is only 47 kilograms, and it is about 1.8 meters tall. Its walking posture is light and stable. The lighter weight makes the robot more flexible during movement, with less inertia, facilitating rapid adjustment of posture to adapt to different situations and thus better maintain balance. Meanwhile, it has 19 degrees of freedom in total, 10 in the legs, enabling highly flexible pace adjustment. The waist is equipped with 1 degree of freedom to ensure smooth and natural movements, and the arms have 8 degrees of freedom, allowing it to perform complex operational tasks. This multi - degree - of - freedom structural design also contributes to enhancing the robot's balance ability.
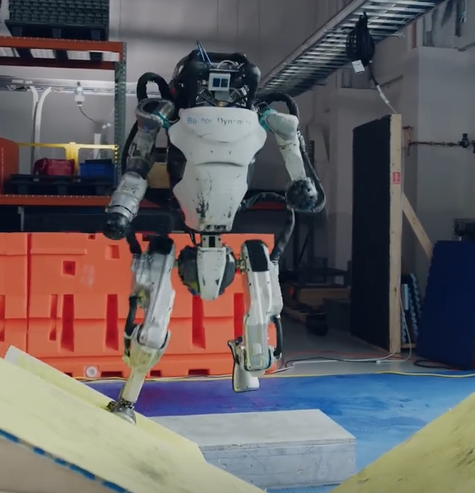
Ⅱ.Boston Atlas
Advanced Control Algorithms
Atlas relies on control algorithms developed by the Institute for Human and Machine Cognition (IHMC) in Florida. It can maintain balance on the edge of a plywood less than an inch thick for about 22 seconds. Through algorithms such as Model Predictive Control (MPC), it can adjust the torque and speed of each joint in real - time. Even when performing complex actions like backflips, it can ensure the stability of the center of gravity during the flipping process.
Precise Perception System
It is equipped with a variety of sensors including LiDAR, RGB - D cameras, Inertial Measurement Units (IMUs), and joint force sensors. LiDAR and RGB - D cameras can construct a 3D environmental model, detecting obstacles and ground unevenness in advance. This enables the robot to adjust its steps and posture in advance to maintain balance. IMUs monitor the posture and speed in real - time, and joint force sensors detect the forces between the legs and the ground, providing crucial data for balance control.
Highly Flexible Joint Design
Atlas has 28 degrees of freedom, with 6 degrees of freedom in each leg and arm, 3 degrees of freedom in the back joints, and 1 degree of freedom for neck pitching. This multi - degree - of - freedom joint design allows Atlas to adjust its body posture as flexibly as a human. During various actions such as walking, jumping, and carrying, it can quickly adjust the position of the center of gravity to maintain body balance.
Powerful Power Systemt uses high - performance electric actuators or hydraulic drive systems, which can provide powerful and precise power output for the robot. When facing external disturbances or complex terrains, such as walking in the snow, crossing wooden obstacles, or triple - jumping on boxes of different heights, it can react rapidly, adjust its posture, and maintain balance.
Ⅲ.Tesla Optimus

Advanced Neural Networks and Control Algorithms
- Efficient Processing and Precise Control:The neural network running on the embedded computer can process data from onboard sensors and respond within 2 to 3 milliseconds, enabling precise control of the electric limbs. This allows the robot to adjust its posture and steps in a timely manner while walking or running to maintain balance.
- Autonomous Adaptation to Complex Terrains:Without the assistance of the vision system, Optimus can walk or even run down a 45 - degree slope covered with roots and rocks. It relies entirely on advanced neural networks and built - in balance mechanisms to handle complex terrains, autonomously adjusting its body posture and steps.
Multi - sensor Fusion
- Inertial Measurement Unit (IMU) and Torque Sensors:Even in environments where vision is limited or unavailable, sensors like IMUs and torque sensors enable the robot to accurately perceive its own posture, speed, and force - bearing conditions. They monitor information such as body tilt and acceleration in real - time, providing crucial data for balance control, enabling the robot to react quickly to maintain balance.
- Added Foot Force/Torque Sensing:The second - generation robot has added foot force/torque sensing, which further enhances the perception of the contact force and torque between the feet and the ground. This allows the robot to more precisely adjust the force and posture of its feet during walking and operation, thus better maintaining balance.
Highly Flexible Body Structure
- Multi - degree - of - freedom Design:Optimus has over 200 degrees of freedom, and its bionic fingers are extremely flexible with 27 degrees of freedom, capable of natural bending. During walking, the coordination of multiple degrees of freedom in joints such as those in the legs and waist enables the robot to adjust its body posture and center - of - gravity position as flexibly as a human, quickly adapting to terrain changes and maintaining balance.
- Lightweight and Balance Improvement:The weight of the second - generation robot has been reduced from 73 kg to 63 kg. The lighter weight makes the robot more flexible during movement with less inertia, which helps improve its balance ability. Meanwhile, its sense of balance and body control have been improved, allowing it to perform actions such as squats.







